Researchers at Harvard University found that adding controlled randomness to robot movement improves efficiency in crowded environments. The study, published in the Proceedings of the National Academy of Sciences, shows how swarm systems can avoid congestion by balancing order and unpredictability. Conducted through simulations and lab experiments in the Netherlands, the work outlines how simple local rules can optimize performance in tasks like disaster cleanup and manufacturing.
Key Takeaways:
- Harvard SEAS researchers show mathematically that when many robots share a space, adding a certain amount of randomness in their paths improves their efficiency.
- Their study exemplifies how simple local rules can lead to the emergence of complex, self-organized task completion.
- Their formulas could guide the design of robot swarms or crowded public spaces.
In a crowded workspace, more hands do not always mean faster results. That tension sits at the center of a new study from Harvard researchers, who examined how swarms of robots behave when tasked with completing jobs in confined areas.
The findings point to a counterintuitive conclusion. A measured dose of randomness, described as “noise,” can prevent traffic jams among robots and improve how quickly they complete tasks.
The research was led by doctoral student Lucy Liu under the guidance of L. Mahadevan, a professor of applied mathematics, organismic biology, and physics. The work combines mathematical modeling, large-scale computer simulations, and physical experiments with real robots.
Robot swarm congestion and optimal density explained
The study begins with a familiar problem. In environments with limited space, adding more agents, whether robots or humans, initially increases productivity. Beyond a certain threshold, congestion builds and performance declines.
Researchers describe this as a density problem. Too few agents leave resources underutilized. Too many create interference, slowing movement and task completion.
To address this, the team modeled each robot as a simple agent assigned random start and end points. Once a destination was reached, a new one was immediately assigned. This continuous loop simulated real-world operations such as warehouse logistics or environmental cleanup.
Each agent moved toward its goal with varying levels of directional precision. With no randomness, robots followed straight paths. With high randomness, they wandered in zigzag patterns.
The results revealed two extremes. Perfectly straight movement led to bottlenecks where robots blocked each other. Excessive randomness removed congestion but reduced efficiency because agents strayed too far from their targets.
Between these extremes, researchers identified a narrow optimal range. Within this “Goldilocks zone,” robots deviated just enough to avoid collisions while still progressing toward their goals.
“This might be counterintuitive, because how could randomness make things easier to work with?” Liu said in a statement released by Harvard. “But in this case, when you have a lot of randomness, it becomes possible to take averages.”
Those averages allowed the team to develop mathematical formulas estimating what they call “goal attainment rate,” or how many tasks are completed per unit of time.
Lab experiments with real robots confirm simulation results
To test whether theoretical predictions would hold in physical systems, the Harvard team partnered with researchers at Eindhoven University of Technology in the Netherlands.
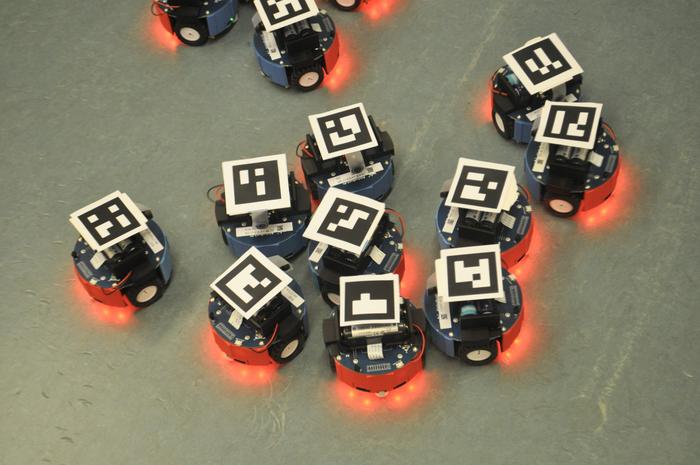
In a controlled lab environment, small wheeled robots were deployed in a confined space. Each unit carried a QR code that allowed overhead cameras to track position and assign new destinations in real time.
The robots moved more slowly and less precisely than their simulated counterparts. Despite these limitations, the same patterns emerged.
Straight-line movement caused clustering and slowdowns. Highly random movement reduced congestion but wasted time. Moderate randomness allowed robots to flow past one another while maintaining steady progress.
The consistency between simulations and physical experiments strengthens the study’s central claim. Efficiency in crowded systems does not require perfect coordination or centralized control.
Instead, local decision-making rules can produce large-scale order.
Implications for robotics, cities, and crowd management
The findings extend beyond robotics. Researchers say the principles apply to a wide range of systems involving moving agents in confined spaces.
These include autonomous vehicles navigating traffic, pedestrians moving through busy transit hubs, and even biological systems such as ant colonies or animal herds.
Mahadevan described the broader relevance in the study’s accompanying materials. Understanding how active matter organizes itself in crowded environments, he said, can inform fields ranging from behavioral ecology to urban planning.
The research suggests that systems designed with a degree of controlled unpredictability may perform better than those optimized for strict order.
That idea challenges conventional engineering approaches, which often prioritize precision and predictability.
For example, in warehouse automation, robots are typically programmed to follow highly structured paths. Introducing limited variability could reduce collisions and improve throughput under heavy loads.
Similarly, urban planners could apply these insights to crowd flow in public spaces. Designing pathways that encourage slight variations in movement might reduce bottlenecks during peak hours.
Simple rules over centralized intelligence
One of the study’s key conclusions is that complex coordination does not necessarily require complex systems.
The researchers found that even simple agents, operating with minimal information and no centralized command, could achieve efficient outcomes when given the right movement rules.
This aligns with a broader trend in swarm robotics, where decentralized systems mimic behaviors observed in nature.
Ant colonies, for instance, rely on local interactions rather than top-down control to organize large-scale activities. The Harvard study suggests similar principles can be engineered into robotic systems.
Liu said her interest in the topic stems from a focus on designing safer and more efficient high-traffic environments. The research offers a framework for predicting how density and movement patterns interact, which could inform both physical infrastructure and digital systems.
A framework for future applications
The study’s mathematical models provide a tool for determining optimal conditions in different scenarios. By adjusting variables such as agent density and noise levels, designers can estimate how a system will perform before deploying it.
Funding for the research came from the National Science Foundation Graduate Research Fellowship Program, along with support from the Simons Foundation and the Henri Seydoux Fund.
While the experiments focused on relatively simple robots, the underlying principles are expected to scale to more complex systems.
From disaster response fleets to automated factories, the balance between order and randomness may prove critical.
In crowded environments, the study suggests, a little unpredictability is not a flaw. It is part of the solution.
Also Read:
Scientists Develop Faster Method To Track Quantum Memory Loss In Qubits